
- Skråplan
- Bil
- Pc med datalogger-program
- Koblingsboks
- Føler
Galilei fant ut at gjenstander som rullet nedover skråplan med minimal friksjon hadde konstant akselerasjon.
Det vil si at hastigheten øker lineært med tiden.
Og at posisjonen (avstand fra utgangspunkt) øker med kvadratet av tiden.
Helt generelt har vi altså:
Posisjon: s(t)=s0+v0t+½at2 s0 er startposisjon ift. utgangspunkt, når t=0
v0 er starthastighet i utgangspunktet, når t=0
Andregradsfunksjon!Hastighet: v(t)=s'(t)=v0+at Lineær funksjon! Akselerasjon: a(t)=v'(t)=a Konstant funksjon!
|
|
 |
|
 |
|
 |
|
 |
|
 |
|
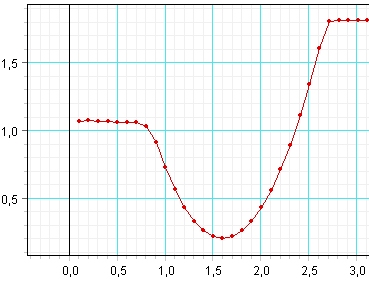 |
Posisjon (andregrad i aktuelt tidsintervall) |
 |
Hastighet (lineær i aktuelt tidsintervall) |
 |
Akselerasjon (konstant i aktuelt tidsintervall) |
Vi ser at hastighet og akselerasjon blir mer og mer unøyaktig, da logge-programmet regner ut disse ved å regne ut stigningstallet til grafen over i hvert målt tidsintervall. (ca. 0.1 sekund)
En relativt liten feil i funksjonsverdi fører til adskillig større avvik i utregnet stigningstall!
Posisjonsverdiene i grafene over ble eksportert fra loggeprogrammet og jeg silte ut de beste målingene mellom 1 og 2.5 sekunder.
Disse ligger i filen posisjon.txt,
som kan lastes ned og importeres i DataStudio,
og i denne tabellen som vi bruker i lommeregneren. (Distribueres
via kabel i timene.)
| t: | s(t): |
| 1.01 | 0.726 |
| 1.10 | 0.563 |
| 1.20 | 0.433 |
| 1.30 | 0.331 |
| 1.40 | 0.260 |
| 1.50 | 0.217 |
| 1.60 | 0.204 |
| 1.70 | 0.219 |
| 1.80 | 0.262 |
| 1.90 | 0.332 |
| 2.00 | 0.429 |
| 2.11 | 0.555 |
| 2.21 | 0.709 |
| 2.31 | 0.893 |
| 2.41 | 1.11 |
| 2.51 | 1.34 |
Programmet DataStudio gir med knappen "Tilpass, Kvadratisk tilpasning" dette resultatet:

Dette betyr at programmet har funnet posisjonen som: s(t)=0.717-1.7 t+1.41 t2
Deriverer vi får vi hastigheten: v(t)=-1.7+2.82t
Og akselerasjonen: a(t)=2.82
Her må vi bære oppmerksomme på at t i denne funksjonen er satt til 0 der den merkede (gule) delen av grafen starter!
Vi legger inn tabellen over i L1 og L2:

For å starte med t=0 kan vi gå opp på overskriften L1, skrive L1-1.01, og får da:

der alle t-verdiene har fått trukket fra 1.01 sekunder.
Så kjører vi STAT, CALC, 5:QuadReg L1, L2 og får omtrent:
a=1.40
b=-1.68
c=0.709
som gir:
Posisjon: s(t)=0.709-1.68 t+1.40 t2
Fart: v(t)=-1.68+2.8t
Og akselerasjonen: a(t)=2.8
som ikke er så langt fra det DataStudio ga.